受付時間 月曜~金曜 8:45~17:45
URロボット(3e)による両腕同期制御で実現する積み上げ・組立工程
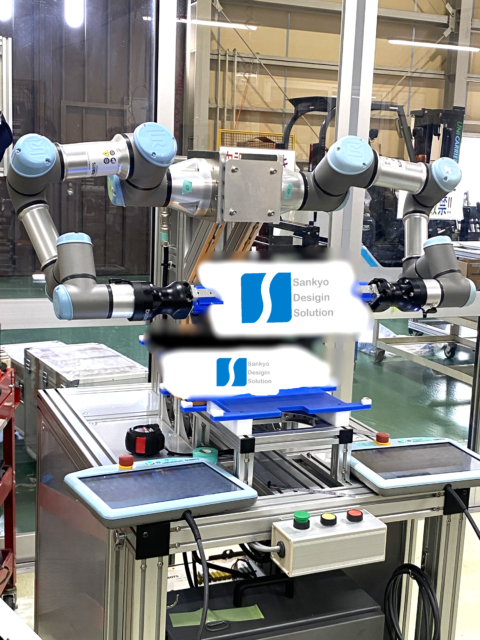
本記事では、URロボット(3e)を使用した双腕構成による、板状製品の積み上げ・組立工程についてご紹介します。
両腕を同期制御することで、効率的かつ安定した自動化を実現しています。
■ 作業準備(作業者の役割)
本工程では、作業開始前の段取りが品質を左右します。
作業者は専用の枠に金属パーツをセットし、製品に付けられた赤い点を基準に方向を確認します。
この方向設定が後工程に大きく影響するため、正しい方向での確実なセットが求められます。
準備完了後、スタートボタンを押すことでロボットが自動動作を開始します。
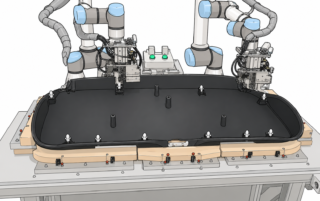
■ 両腕ロボットの同期動作
URロボット(3e)をベースに、双腕アームが連携しながら以下の動作を行います。
- 原点位置から同時に動作開始
- ハンドで製品をチャックし、積み上げ工程へ搬送
- 配置位置に応じて姿勢を最適化
特に、製品の配置方向が異なる箇所では、
- ロボットのハンドで製品をチャックしたまま、ハンドを回転して製品を反転
- 必要に応じて掴み直しを行い、姿勢を補正
といった柔軟な動作を組み込むことで、精度の高い組立を実現しています。
■ ビジョンレス制御のポイント
本設備では、あえてビジョン(画像認識)を使用していません。
その代わりに、
- 事前の位置決め
- 向きのルール化
- ロボットの動作設計
によって安定稼働を実現しています。
この構成により、設備コストを抑えつつ、トラブル要因を減らすシンプルなシステムとなっています。
■ まとめ
URロボット(3e)を用いた両腕同期制御により、
従来は人手に頼っていた積み上げ・組立作業を高効率で自動化しました。
人の作業(段取り)とロボットの正確な動作を組み合わせることで、
シンプルかつ再現性の高い生産ラインを実現しています。